Integrating Large Language Models for General-Purpose Robots
Introduction
Significance of AI in Robotics:
- AI advancements drive the rise of general-purpose robots as it enables robots to perform diverse tasks with increased efficiency and adaptability.
Examples of AI-Powered Robots:
- Autonomous Vehicles:
- Example: Tesla’s self-driving cars
- Application: Navigate roads, avoid obstacles, and respond to traffic signals autonomously.
- AI Techniques: Deep Learning
- Reference: Tesla Autopilot
- Service Robots in Hospitality:
- Example: SoftBank Robotics’ Pepper
- Application: Used in hotels and restaurants to greet guests, provide information, take orders, and even entertain.
- AI Techniques: Speech Recognition, Emotion Detection
- Reference: Pepper Robot
- Security Robots:
- Example: Knightscope K5
- Application: Patrol areas such as parking lots, corporate campuses, and malls to detect anomalies, provide surveillance, and deter crime.
- AI Techniques: Anomaly Detection
- Reference: Knightscope K5

Background
3 phases in autonomous robotic systems:
graph LR;
B[Perception] --> C[Planning]
C --> D[Control]
Perception

Planning
Control

Motivation
Challenges with Traditional AI in Robotic systems:
- Rule-based approach, optimisation algorithms, deep learning models
- hard to deal with unpredictable, real-world environments.
- hard to effectively generalize real-world tasks.
Leveraging Large Language Models: GPT, LLAMA, Gemini…
graph LR;
A[LLM]
A --> B[Pre-trained Foundation models]
A --> C[Accept Natural Language Instructions]
A --> D[Process Multi-Modal Sensory Data]
B --> B1([large-scale training])
B --> B2([extensive datasets])
B1 --> B3([generalize knowledge])
B2 --> B3([generalize knowledge])
C --> C1([understand natural language commands])
C --> C2([respond in natural language])
C1 --> C4([user interaction])
C2 --> C4([user interaction])
D --> D1([interpret sensory data])
D --> D3([generate control signals with justification])
D1 --> D4([explainability])
D3 --> D4([explainability])
Research Questions
- integrating LLM Robot - perception, planning, control:
- How can LLMs be effectively integrated into general-purpose robotic systems to improve the interpretation of natural language instructions and multi-modal sensory data for enhanced task planning and action generation?
- improving LLM performance - response generation with domain specific knowledge:
- What are the optimal strategies that allows LLMs to access and utilize domain-specific knowledge in real-time to improve the performance and adaptability of general-purpose robots?
- mitigating LLM hallucinations - error handling / mitigation:
- How can we minimise the risks of inaccurate or false information generated by LLMs, such as mismatches between robots’ actions and LLM-generated explanations, to enhance transparency and trust in human-robot interactions?
Related Works
Before LLM Emergence
graph LR;
B[Perception] --> B1[Scene Understanding]
B1 --> B1a[Object Detection]
B1 --> B1b[Semantic Segmentation]
B1 --> B1c[Scene Reconstruction]
B --> B2[State Estimation and SLAM]
B2 --> B2a[Pose Estimation]
B2 --> B2b[Mapping with Sensors]
B --> B3[Learning-Based Methods]
B3 --> B3a[Supervised Techniques]
B3 --> B3c[Self-Supervised Techniques]
C[Planning] --> C1[Search-Based Planning]
C1 --> C1a[Heuristics for Pathfinding]
C1 --> C1b[Graphs for Pathfinding in Discrete Spaces]
C --> C2[Sampling-Based Planning]
C2 --> C2a[Random Sampling in Configuration Spaces]
C2 --> C2b[Path Connections]
C --> C3[Task Planning]
C3 --> C3a[Object-Level Abstractions]
C3 --> C3b[Symbolic Reasoning in Discrete Domains]
C --> C4[Reinforcement Learning]
C4 --> C4a[End-to-End Formulations]
D[Control] --> D1[PID Control Loops]
D1 --> D1a[Fundamental Method for Operational State Maintenance]
D --> D2["Model Predictive Control (MPC)"]
D2 --> D2a[Optimization-Based Action Sequence Generation]
D2 --> D2b[Application in Dynamic Environments]
D --> D3[Imitation Learning]
D3 --> D3a[Mimicking Expert Demonstrations]
D3 --> D3b[Application in Urban Driving]
D --> D4[Reinforcement Learning]
D4 --> D4a[Optimizes Control Policies through Accumulated Rewards]
D4 --> D4b[Direct Action Generation from Sensory Data]
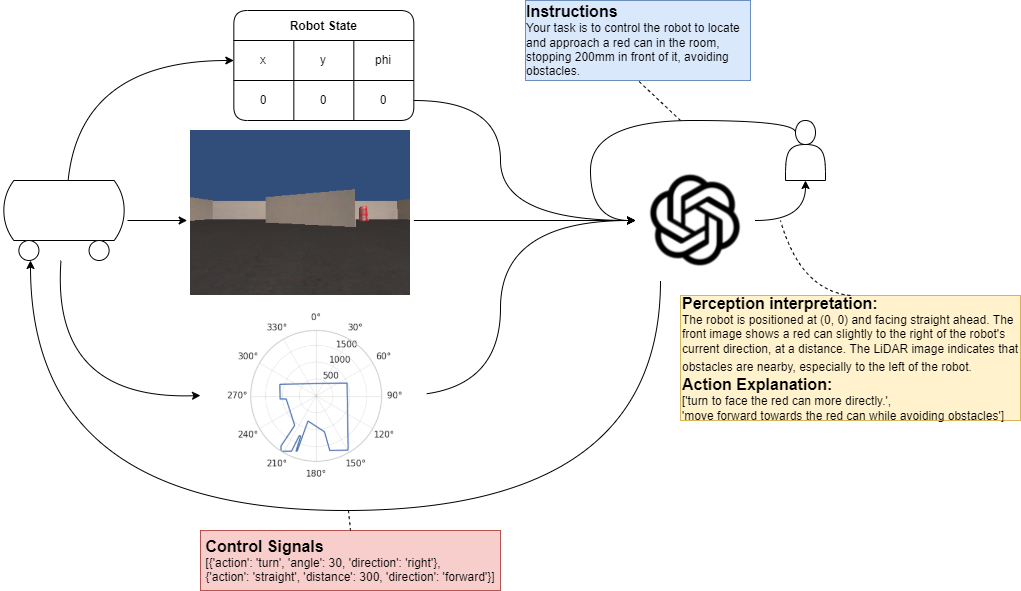
LLM-powered Robotics
- Perception
- receive sensory data and interpret it in natural language.
- Planning
- generate task plans based on
- natural language instructions and
- perception result.
- generate task plans based on
- Control
- generate actions based on the planning result.
- explain the actions taken in natural language.
- reference for the next action generation.
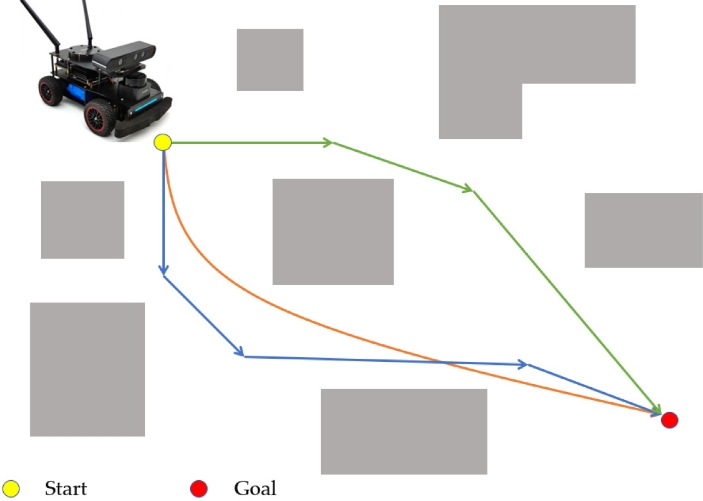
Current Work
LLM for mobile robot navigations using Eyesim