Notes for paper “The Development of LLMs for Embodied Navigation”.
Contributions
-
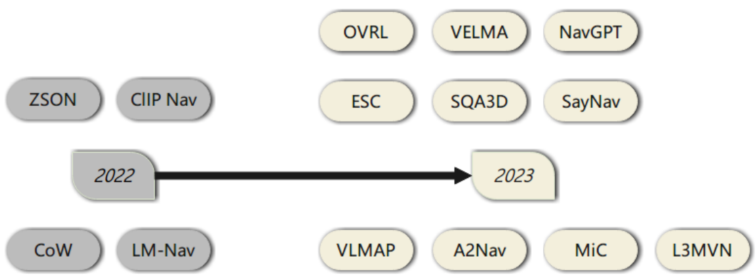
Summarized the evolutionary trajectory of LLMs and their applications in embodied intelligence.
-
Presented a selection of currently popular benchmarks and conducted a comparative evaluation among them.
-
Provided a comparative analysis and introduction of commonly used datasets in LLMs for Embodied Intelligence.
Background
LLM
- Evolution of LLMs:
- Represents a milestone in Natural Language Processing (NLP) and Machine Learning.
- Examines early NLP and machine learning stages, including methods like Bag-of-Words (BoW).
-
Describes the limitations of simpler algorithms like N-grams and decision trees.
- Word Embedding Models:
- Introduces word embedding models, such as Word2Vec and GloVe, around 2013.
- Highlights Word2Vec’s efficiency in capturing word relationships and GloVe’s optimization for large datasets.
-
Discusses the shift towards incorporating pre-trained word vectors into sequence models like RNNs and LSTMs.
- Sequence Models and Transformers:
- Describes challenges with RNNs and the emergence of specialized variants like LSTMs and GRUs.
- Introduces the Transformer architecture in 2017, emphasizing its scalability and speed compared to RNNs.
-
Mentions subsequent models like Vision Transformer (ViT) and OpenAI’s CLIP, expanding Transformer’s use to visual processing tasks.
- Large Language Models (LLMs):
- Discusses BERT and GPT series, including their applications in text generation tasks.
- Highlights “zero-shot learning” capabilities of GPT models and the need for fine-tuning in certain tasks.
Embodied Intelligence
- Embodied Intelligence:
- Defines Embodied Intelligence as the understanding and development of intelligent agents interacting with their environment.
- Discusses leveraging NLP advancements for converting human instructions to formats interpretable by embodied agents.
-
Explores the merging of LLMs, like GPT-3, with Embodied Intelligence for enhanced context-awareness.
- High-level and Low-level Controls:
- Explains the importance of high-level and low-level controls in intelligent agent design.
- Differentiates between high-level controls (task scheduling, strategy development) and low-level controls (direct command over operational functions).
-
Highlights applications of these controls in terrain recognition, machinery lifespan prediction, and gaze mechanisms emulation.
- Integration of Controls:
- Emphasizes the need for harmonious integration of high-level and low-level controls for developing robust and generalized intelligent agents.
-
Provides an example of the LM-Nav model, combining self-supervised robotic control, vision-language model, and a large language model for long-horizon planning.
- Multi-Agent Systems:
- Mentions research on multi-agent systems focusing on cooperation issues.
-
Acknowledges contributions to broadening tasks achievable by agents, enhancing work efficiency, and improving real-world applicability.
- Challenges in Embodied Intelligence:
- Discusses the challenge of designing agents capable of real-time learning and adaptation to their environment.
- Highlights the importance of sensory-motor coordination and morphological computation in embodied cognition.
- Describes the use of machine learning, reinforcement learning, and evolutionary algorithms for creating adaptive agents.
Methodologies
- Grounded Language Understanding:
- bridging high-level language and low-level actions: integrate with sensors, databases, or simulated
environments to generate and interpret language applicable to real-world scenarios.
- LLM-Grounder: 3D visual grounding (Yang et al.)
- Carta et al. boost LLM using RL
- challenges: the integration of text, images, and sensor data, latency reduction for real-time applications, and maintaining training efficiency without sacrificing performance.
- bridging high-level language and low-level actions: integrate with sensors, databases, or simulated
environments to generate and interpret language applicable to real-world scenarios.
- Few-Shot Planning:
- effective planning and decision-making in new tasks with minimal sample data.
- ESC, LLM-Planner, CoT, LLM-DP: enabling embodied agents to execute complex tasks in visually rich environments
- effective planning and decision-making in new tasks with minimal sample data.
- Zero-Shot Navigation:
- Crucial Functions: Natural Language Understanding, Dynamic Planning, Multimodal Input, Real-time Interaction, Task Generalization
- 2 categories:
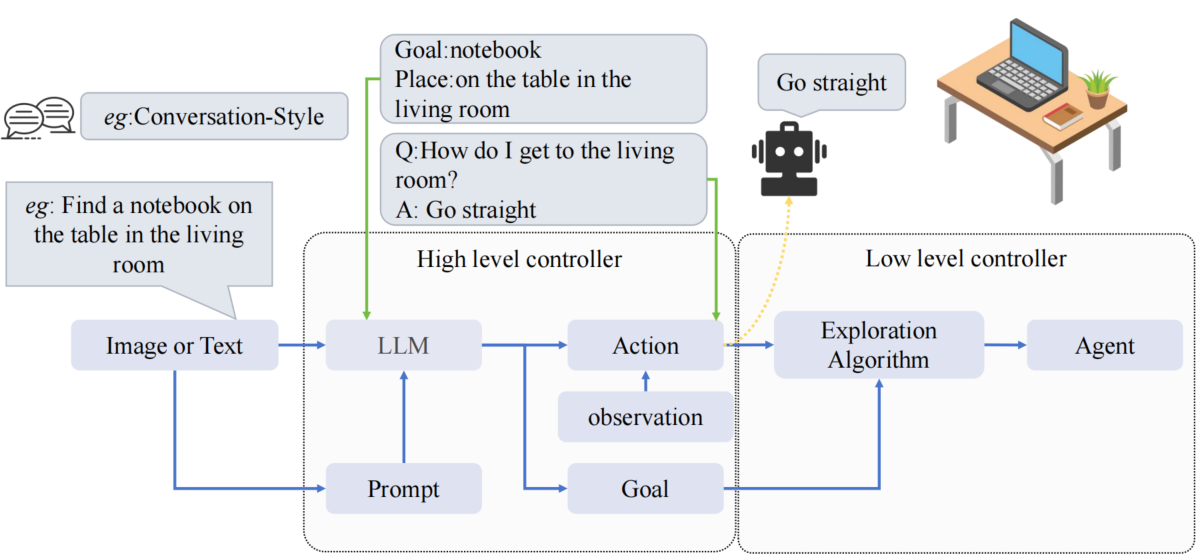
- Category 1: LLMs as Planners
- LLMs directly make plans and decide what actions to take.
- Exploration policies help guide the agents based on these plans.
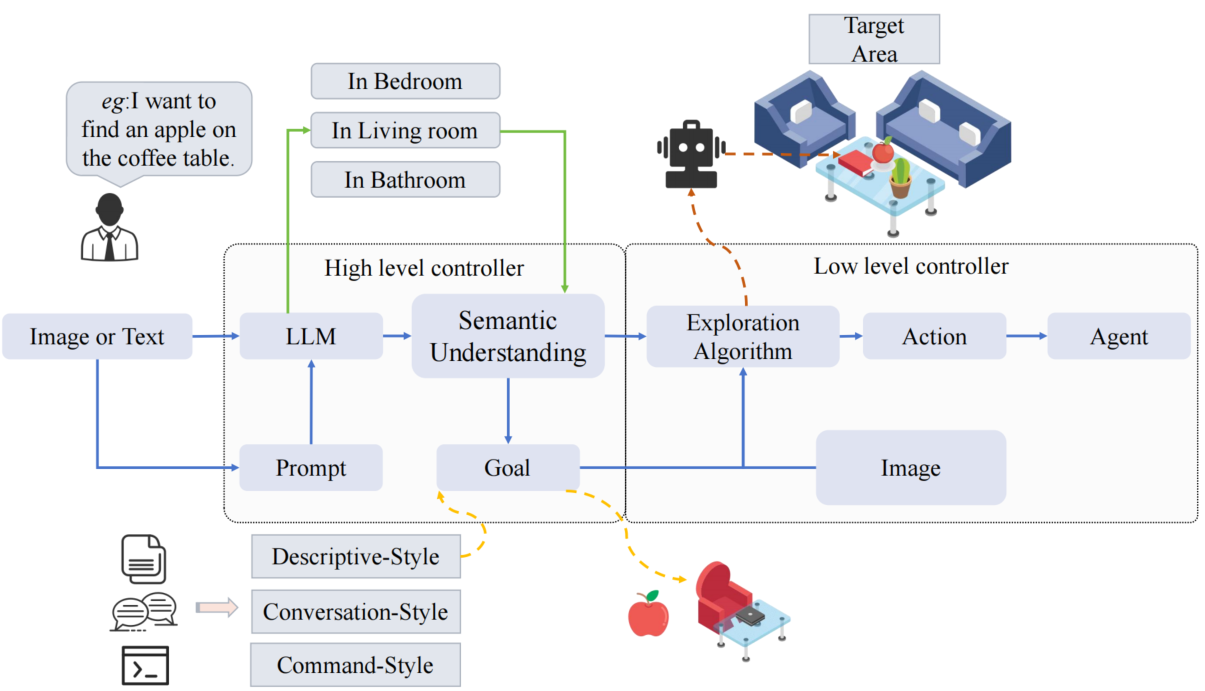
- Category 2: LLMs Analyzing Data
- LLMs look at pictures or text to find important information.
- This important info helps agents decide what actions to take using exploration policies.
- Category 1: LLMs as Planners
- Approaches:
- CoW (CLIP on Wheels), ZSON,
- LM-Nav, CLIP-NAV, SQA3D, L3MVN, VLMAP, OVRL, ESC, NavGPT, VELMA, A^2Nav, MiC, SayNav,
- VoxPoser, ALFRED, PaLM-E, RT-2