summarising UAV-related knowledge and AI-based UAV applications to get ideas for research topics.
UAV background
- classification:
- fixed-wing, single rotor, fixed-wing hybrid, multirotor
- characteristics:
- speed and flight time, payload, sensing equipment, software, range and altitude, controllers
- applications:
- search and rescue
- infrastructure and construction inspection
- emergency medical services
- real-time monitoring of road traffic
- precision agriculture
- …
-
challenges:
-
Efficient target detection
-
unstable networks for swarm of drones
-
resource allocation/energy optimisation
-
limited transmission range
-
standardisation and operational regulations
-
security of sensitive data (pos, loc…)
-
…
-
- AI research directions:
- deep-learning-based novel strategies for UAVs, particularly for SAR mission
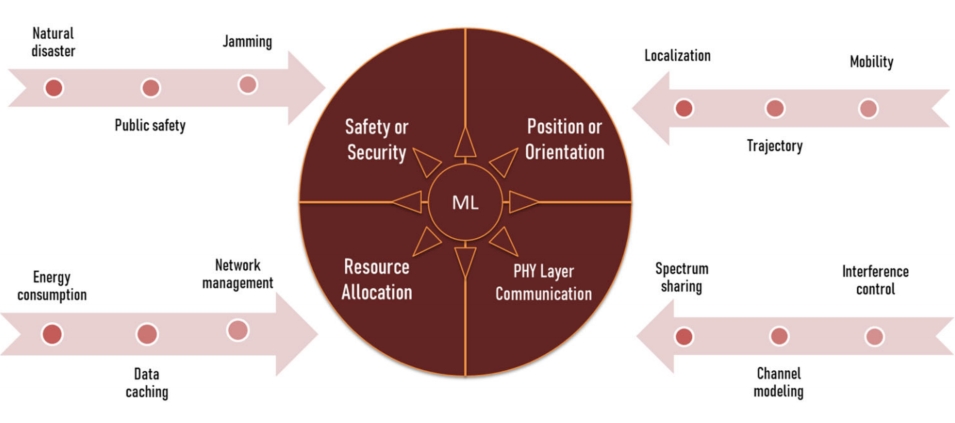
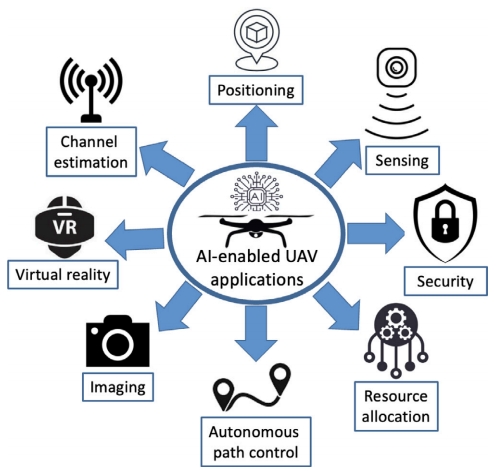
AI features
- Detection - machine learning:
- deep learning algorithms for target detection
- Navigation - automatic planning:
- optimal path planning in flight control system
- autonomous obstacle avoidance
- Communication - distributed AI:
- coordinate intelligent behaviors among a group of autonomous mobile agents
- multi-UAV cooperative formation (UAV swarm)
Detection
Overview
1. Image detection
Automated Wheat Disease Detection using a ROS-based Autonomous Guided UAV
- image-based deep learning approach
- object detection model: YOLO V4, EfficientDet, MobileNet V3, VGG 16, Inception, ResNet 50, and EfficientNet-B0.
- CNN: weight-sharing ability
- a custom dataset has been created and labeled
- data augmentation techniques: increase the number of training data
- efficient mapping and navigation system is presented using a Gazebo simulation
- SLAM (simultaneous localization and mapping):
- map: contains the static obstacles of the robot’s workspace
- localization: enables the robot to map its environment while simultaneously estimating its own position regarding this map.
- using sensors (camera, laser range-finder, ultrasonic sensor) to evaluate its distance to the nearby obstacles.
- implemented and tested in a simulation environment
- SLAM (simultaneous localization and mapping):
-
A 2D simultaneous localization and mapping algorithm is used for mapping the workspace autonomously.
- Summary: ml for image classification, slam for exploration, A* algorithm for determining move trajectory.
Navigation
Overview
- keywords:
- search and rescue
- path planning
- combine optimisation algorithm with reinforcement learning
- outdoor
- adaptive to unknown environment
- Categorise by application:
- Outdoor
- surveillance, good delivery, target tracking, and crowd monitoring,
- Indoor
- indoor mapping, factory automation, and indoor surveillance
- wireless networking
- search and rescue
- Outdoor
- Categorise by parameter:
- inertia-based
- gyroscopes, accelerometers, and altimeters to guide the onboard flight controller
- vision
- cameras
- signal-based
- GPS modules and a remote radio head (RRH) in the case of cellular connectivity
- inertia-based
- taxonomy of AI approaches for UAV navigation
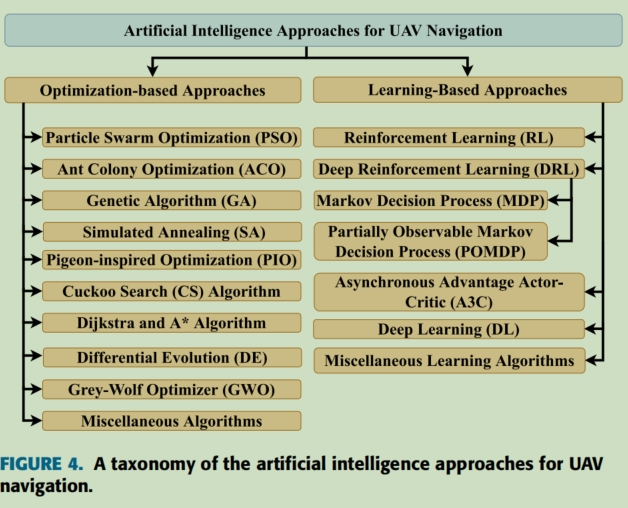
- reinforcement learning (RL)
Visual Odometry
Real-time ROS Implementation of Conventional Feature-based and Deep-learning-based Monocular Visual Odometry for UAV
- localization is one of the most important tasks for UAVs
- conventional feature-based methods:ORB-SLAM3
- detection of key features in each image and match them on consecutive images to estimate the camera motions
- Deep-learning: SC-SfMLearner (self-supervised learning)
- achieve high results on public dataset, but lack of real-time implementation in ROS for navigation system.
- conventional feature-based methods:ORB-SLAM3
- photo-realistic simulator, Flightmare, is used to test the implementation
- fast in collecting and computing a large number of images,
- but also integrate an accurate UAV dynamic
-
Visual Odometry (VO) benchmark dataset: KITTI, EuRoC, and CityScapes
- evaluation process is done by integrating the aforementioned pose estimators into a real-time navigation system,
benchmarking on streams of photo-realistic synthesized RGB data acquired from Flightmare.
- the outperforming of the features-based ORB-SLAM3 over learning-based counterpart, SC-SfMLearner
- learning-based algorithms are vulnerable to failure cases in which the drone trajectory contains excessive yaw rotations.
Communication
##
References
The Application of Artificial Intelligence Technology in UAV
A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook
Automated Wheat Disease Detection using a ROS-based Autonomous Guided UAV



