Learning Robot Operating System (ROS) for the preparation of applying for a PhD degree.
ROS2 benefits:
- create the base layer fast
- provide a standard for robotics applications
- use on any robot
- allows you to avoid reinventing the wheel
- open source community
- plug and play packages
Roadmap:
- Basics
- topics
- publisher - subscriber
- services
- server - client
- interfaces
- custom msg
- topics
- TF (TransForm)
- Visualise Robot TFs in RViz 2
- URDF (Unified Robot Description Format)
- Visualise URDF in RViz 2
- simulate robot with Gazebo
- Navi2 stack
- ros2 control
- Moveit2
Installation and configuration
Step 1 check EOL to select the appropriate distribution. (Humble until 2027)
Step 2 install ubuntu 22.04 (wsl), ros2, colcon, etc., by following the tutorial and documents in the reference.
Step 3 run a ros demo
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_cpp listener
Step 4 create and set up a workspace
mkdir ros2_ws
cd ros2_ws/
mkdir src
colcon build
source ~/ros2_ws/install/setup.bash
Step 5 create ros2 package: separate your code into reusable blocks.
cd ~/ros_ws/src
# create package for python
ros2 pkg create my_py_pkg --build-type ament_python --dependencies rclpy
# fix the bug occurred when setuptools==59.6.0
pip3 install setuptools==58.2.0
# create package for cpp
ros2 pkg create my_cpp_pkg --build-type ament_cmake --dependencies rclcpp
# build all packages
colcon build
# build a single package
colcon build --packages-select my_py_pkg
-
my_py_pkg: package name -
--build-type ament_python: specify build type, ament (build system), python (language) -
dependecies rclpy: library used
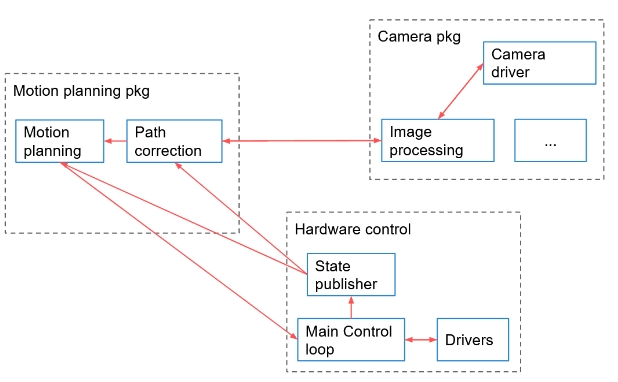
ROS2 Nodes
- subprograms in your application, responsible for only one thing
- combined into a graph
- communicate with each other through topics, services, and parameters
- benefits
- reduce code complexity
- fault tolerance - loosely coupled
- can be written in Python, C++,…
- All nodes’ names are unique.
Python node
Step 1 demo code in ros2_ws/src/my_py_pkg/my_py_pkg/my_first_node.py
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
class MyNode(Node):
def __init__(self):
super().__init__("py_test")
self.counter_ = 0
self.get_logger().info("Hello ROS2")
self.create_timer(0.5, self.timer_callback)
def timer_callback(self):
self.counter_ += 1
self.get_logger().info("Hello "+str(self.counter_))
def main(args=None):
rclpy.init(args=args)
# create node inside the file, the name of the node is not the name of the file
node = MyNode()
# pause the program and make the node continue alive
rclpy.spin(node)
rclpy.shutdown()
if __name__=="__main__":
main()
run the script ./my_first_node.py
Step 2 amend settings in setup.py
entry_points={
'console_scripts': [
"py_node = my_py_pkg.my_first_node:main" # executable table
],
},
Step 3 build package
cd roc2_ws
colcon build --packages-select my_py_pkg
Step 4 execute package (the path for built packages can be found in setup.cfg)
cd /install/my_py_pkg/lib/my_py_pkg
ls # found py_node
source ~/.bashrc
./py_node # the second way to run the node
However, these approaches are not used in reality. We will use ros2 run when we actually run a project
source .bashrc
ros2 run my_py_pkg py_node
CPP node
Step 1 manually config VScode library path: ctrl+shift+p -> edit C/C++: edit configuration JSON
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/opt/ros/humble/include/**"
],
"defines": [],
"compilerPath": "/usr/bin/clang-14",
"cStandard": "c17",
"cppStandard": "c++14",
"intelliSenseMode": "linux-clang-x64"
}
],
"version": 4
}
Step 2 demo code in ros2_ws/src/my_cpp_pkg/my_cpp_pkg/my_first_node.cpp
#include "rclcpp/rclcpp.hpp"
class MyNode : public rclcpp::Node {
public:
MyNode() : Node("cpp_test"), counter_(0) {
RCLCPP_INFO(this->get_logger(), "Hello Cpp Node");
timer_ = this->create_wall_timer(std::chrono::seconds(1),
std::bind(&MyNode::timeCallback, this));
}
private:
void timeCallback() {
counter_++;
RCLCPP_INFO(this->get_logger(), "Hello %d", counter_);
}
rclcpp::TimerBase::SharedPtr timer_;
int counter_;
};
int main(int argc, char **argv) {
rclcpp::init(argc, argv);
auto node = std::make_shared<MyNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
Step 3 amend settings in CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(my_cpp_pkg)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
# add executable table
add_executable(cpp_node src/my_first_node.cpp)
ament_target_dependencies(cpp_node rclcpp)
# install it inside the workspace
install(
TARGETS cpp_node
DESTINATION lib/${PROJECT_NAME}
)
# comment out tests
# if(BUILD_TESTING)
# find_package(ament_lint_auto REQUIRED)
# # the following line skips the linter which checks for copyrights
# # comment the line when a copyright and license is added to all source files
# set(ament_cmake_copyright_FOUND TRUE)
# # the following line skips cpplint (only works in a git repo)
# # comment the line when this package is in a git repo and when
# # a copyright and license is added to all source files
# set(ament_cmake_cpplint_FOUND TRUE)
# ament_lint_auto_find_test_dependencies()
# endif()
ament_package()
Step 4 build package
cd roc2_ws
colcon build --packages-select my_cpp_pkg
Step 5 execute,
cd ros2_ws/install/my_cpp_pkg/lib/my_cpp_pkg
./cpp_node
alternatively,
source ~/.bashrc
ros2 run my_cpp_pkg
# then press tab twice to find out all packages
ros2 run my_cpp_pkg cpp_node
ROS2 - Language Libraries:
- rcl: lowest ROS2 library, pure C library, basic functionalities, data distribution studies
- rclcpp: cpp class library, write CPP code
- rclpy: python class library,
- rclnodejs
- rcljava
- …
- ros
- hand gesture
- human-machine teaming
- security